
Dengan lima wahana antariksa aktif yang kini mengorbit planet ini, NASA telah meningkatkan pemantauan lalu lintas untuk memastikan pengorbit Mars tidak terlalu dekat satu sama lain.
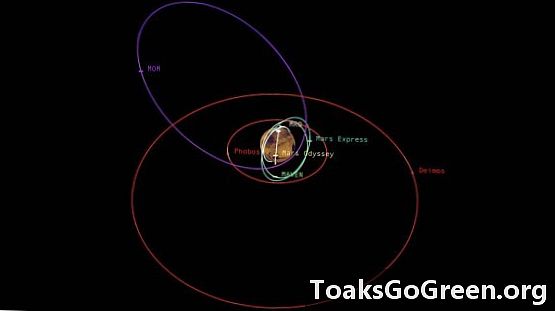
Grafik ini menggambarkan bentuk dan jarak relatif dari Mars untuk lima misi pengorbit aktif ditambah dua satelit alami planet ini. Kredit gambar: NASA / JPL-Caltech
NASA telah meningkatkan proses penghindaran tabrakan - pemantauan lalu lintas, komunikasi dan perencanaan manuver - untuk memastikan bahwa pengorbit Mars tidak saling mendekati terlalu dekat.
Penambahan dua pesawat ruang angkasa baru tahun lalu yang mengorbit Mars menjadikan sensus pengorbit Mars aktif menjadi lima, yang paling banyak. NASA Mars Atmosphere and Volatile Evolution (MAVEN) dan Mars Orbiter Mission India bergabung dengan Mars Express 2003 dari ESA (European Space Agency) dan dua dari NASA: Mars Odyssey 2001 dan Mars Reconnaissance Orbiter (MRO) 2006. Proses penghindaran tabrakan yang baru ditingkatkan juga melacak perkiraan lokasi Mars Global Surveyor NASA, pengorbit 1997 yang tidak lagi berfungsi.
Manajemen lalu lintas di Mars jauh lebih kompleks daripada di orbit Bumi, di mana lebih dari 1.000 pengorbit aktif ditambah perangkat keras tambahan yang tidak aktif menambah bahaya. Karena eksplorasi Mars semakin intensif, dan akan terus melakukannya dengan misi di masa depan, tindakan pencegahan semakin meningkat. Proses baru didirikan untuk mengelola pertumbuhan ini karena anggota baru ditambahkan ke komunitas orbital Mars di tahun-tahun mendatang.
Ini bukan hanya jumlah total pesawat ruang angkasa yang penting, tetapi juga jenis misi orbit yang digunakan untuk mencapai tujuan sains mereka. MAVEN, yang mencapai Mars pada 21 September 2014, mempelajari atmosfer atas. Itu terbang orbit memanjang, kadang-kadang lebih jauh dari Mars daripada pengorbit NASA lainnya dan kadang-kadang lebih dekat ke Mars, sehingga melintasi ketinggian yang ditempati oleh pengorbit tersebut. Untuk keselamatan, NASA juga memantau posisi pengorbit ESA dan India, yang keduanya terbang mengorbit memanjang.
Robert Shotwell adalah chief engineer Program Mars di Jet Propulsion Laboratory NASA, Pasadena, California. Shotwell berkata:
Sebelumnya, menghindari tabrakan dikoordinasikan antara tim navigasi Odyssey dan MRO. Ada sedikit kemungkinan masalah. Orbit MAVEN yang sangat elips, melintasi ketinggian orbit lain, mengubah kemungkinan seseorang perlu melakukan manuver menghindari tabrakan. Kami melacak semua pengorbit jauh lebih dekat sekarang. Masih ada kemungkinan rendah untuk membutuhkan manuver, tetapi itu adalah sesuatu yang perlu kami kelola.
Kelima pengorbit Mars yang aktif menggunakan layanan komunikasi dan pelacakan dari Jaringan Luar Angkasa NASA, yang dikelola di JPL. Ini menyatukan informasi lintasan, dan insinyur dapat menjalankan proyeksi komputer lintasan masa depan beberapa minggu ke depan untuk perbandingan.
Joseph Guinn adalah manajer Bagian Desain dan Navigasi Misi JPL. Guinn berkata:
Ini adalah fungsi pemantauan untuk mengantisipasi kapan lalu lintas akan menjadi berat. Ketika dua pesawat ruang angkasa diperkirakan terlalu dekat satu sama lain, kami memberikan orang muka di muka sehingga tim proyek dapat mulai berkoordinasi tentang apakah ada manuver yang dibutuhkan.
Jumlah ketidakpastian di lokasi prediksi pengorbit Mars beberapa hari ke depan adalah lebih dari satu mil (lebih dari dua kilometer). Menghitung proyeksi selama beberapa minggu ke depan akan melipatgandakan ketidakpastian hingga puluhan mil, atau kilometer. Dalam kebanyakan kasus ketika tabrakan tidak dapat dikesampingkan dari proyeksi dua minggu ke depan, peningkatan presisi dalam perkiraan saat tanggal semakin dekat akan mengesampingkan tabrakan tanpa perlu tindakan penghindaran. Tim misi untuk pengorbit yang relevan diberitahukan sebelumnya ketika proyeksi menunjukkan kemungkinan tabrakan, bahkan jika kemungkinan akan hilang dalam proyeksi berikutnya. Situasi ini terjadi pada akhir pekan Tahun Baru, 2015.
Pada tanggal 3 Januari, pemantauan otomatis menentukan bahwa dua minggu kemudian, MAVEN dan MRO dapat mencapai jarak dua mil (tiga kilometer) satu sama lain, dengan ketidakpastian besar tetap berada pada jarak yang dilewati. Meskipun itu hari Sabtu, otomatis keluar ke tim yang mengoperasikan orbital. Guinn berkata:
Dalam hal ini, sebelum timeline menjadi cukup pendek sehingga perlu merencanakan manuver penghindaran, ketidakpastian menyusut, dan itu mengesampingkan kemungkinan dua pesawat ruang angkasa datang terlalu dekat satu sama lain.
Ini diharapkan menjadi pola yang biasa, dengan peringatan di muka memulai pemantauan tingkat tinggi dan diskusi awal tentang opsi.
Jika persiapan untuk manuver penghindaran diperlukan, perintah pesawat ruang angkasa akan ditulis, diuji dan disetujui untuk kesiapan, tetapi perintah tersebut tidak akan dikirim ke pesawat ruang angkasa kecuali jika proyeksi satu atau dua hari ke depan menunjukkan kemungkinan konjungsi yang berbahaya. Jumlah ketidakpastian tentang lokasi pasti setiap pesawat ruang angkasa bervariasi, sehingga kedekatan yang dianggap tidak aman juga bervariasi. Untuk beberapa situasi, proyeksi satu hari ke depan dari dua kapal yang datang dalam jarak 100 meter (100 meter) satu sama lain dapat memicu manuver.
Proses penghindaran tabrakan formal baru untuk Mars adalah bagian dari Proses Penilaian Konjungsi Deep-Space Otomatis Multi-Misi NASA. Manfaat sampingannya adalah bahwa informasi tentang kapan dua orbital akan saling berdekatan - meskipun terpisah dengan aman - dapat digunakan untuk merencanakan pengamatan sains yang terkoordinasi. Pasangan ini dapat melihat beberapa bagian Mars atau atmosfernya dari sudut pandang yang sama secara simultan dengan instrumen pelengkap.